您好,欢迎来到2024新澳门原料网大全网站!


企业名称:2024新澳门原料网大全
联系人:范总
手机:18032063521
网址:
地址:石家庄市长安区高营镇长泰路
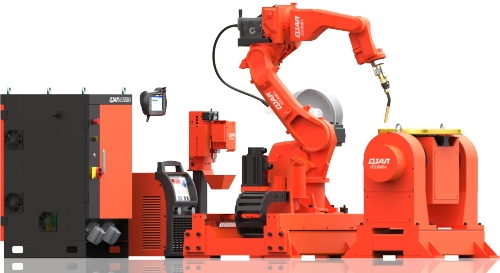
焊接机器人焊接技术是制造业中重要的加工工艺技术之一,其广泛应用于轨道交通、石油化工、航天电子以及建筑等行业。而随着技术的革新及对于人的保护,在许多高危行业及部位的焊接工作开始大规模地制造和使用焊接机器人来代替焊工的工作。焊接机器人是工业机器人的一种,其主要是在机器人的末轴安装焊钳或焊枪,使之具备焊接、切割等功能。

焊接机器人应用于工业生产制造中具有以下几个优点:
1、工作稳定:
焊接机器人能保持稳定的工作状态,提高焊接质量,只要前期规划好焊接机器人工作的轨道以及工作的内容,在持续供电的情况下其工作状态相对于人工来说十分稳定;
2、提高 效率:
在焊接机器人稳定工作状态下必然可以保证其劳动效率的提高,俗话说“像个机器人一样工作”,焊接机器人一旦开始工作就不存在浪费时间的情况,劳动效率自然就会提高;
3、改善工作环境:
焊接机器人可以改善工人的劳动条件,其不存在对于“生存”所需的苛刻条件,可以在人所不能工作的环境条件下保持工作状态。
焊接机器人根据结构坐标系分类:
1、直角坐标型:
这类自动焊接机器人的结构和控制方案与机床类似,其到达空间位置的三个运动(X、Y、Z)由直线运动构成。其优点是运动学模型简单,控制精度容易提高;而缺点是机构庞大、工作空间小、操作灵活性较差。简单而特殊的焊接机器人通常采用这种形式。
2、圆柱坐标型:
这类自动焊接机器人在基座水平转台上装有立柱,水平臂可以沿立柱上下移动,在水平方向伸缩。这种结构的优点是可以获得更高的速度,但是缺点是末端执行器远离柱的轴线延伸得越远,其线性位移的分辨率精度就越低。
3、球坐标型:
这类自动焊接机器人与圆柱坐标结构相比,球面坐标结构更加灵活。但采用同一分辨率的码盘检测角位移时,伸缩关节的线位移分辨率恒定,但转动关节反映在末端操作器上的线位移分辨率则是个变量,增加了控制系统的复杂性。
4、全关节型:
这类自动焊接机器人的结构类似于人的腰和手,其位置和姿态全部由旋转运动实现,其优点是机构紧凑,灵活性好,占地面积小,工作空间大,可获得较高的末端操作器线速度;其缺点是运动学模型复杂,高精度控制难度大,空间线位移分辨率取决于机器人手臂的位姿。