您好,欢迎来到2024新澳门原料网大全网站!


企业名称:2024新澳门原料网大全
联系人:范总
手机:18032063521
网址:
地址:石家庄市长安区高营镇长泰路
当我们评估一家企业,其业务情况值得导入智能搬运机器人的时候,我们需要考虑如何导入智能搬运机器人。智能搬运机器人的导入需要考虑众多要素包括但不限于应用工序、物料特征、物流通道情况、搬运节拍、对接设备的要求等。
一、应用工序
首先我们要考虑我们的智能搬运机器人会用什么工序。一般来说我们会将智能物流搬运机器人的应用领域划分为如下三个大类:
1、仓库内物料的搬运:仓库=》仓库口
2、产线物料的配送和回收:仓库《==》生产线线头
3、生产线之间的转运:产线《==》产线
不同的应用领域对智能搬运机器人的导航方式的选择会有很大的影响。目前来说市面上常用的导航方式有:反射激光导航、slam激光导航、3D视觉导航、磁条导航、二维码导航、GPS定位导航等,不同的导航方式有各自不同的优缺点。
对比方式详情如下:
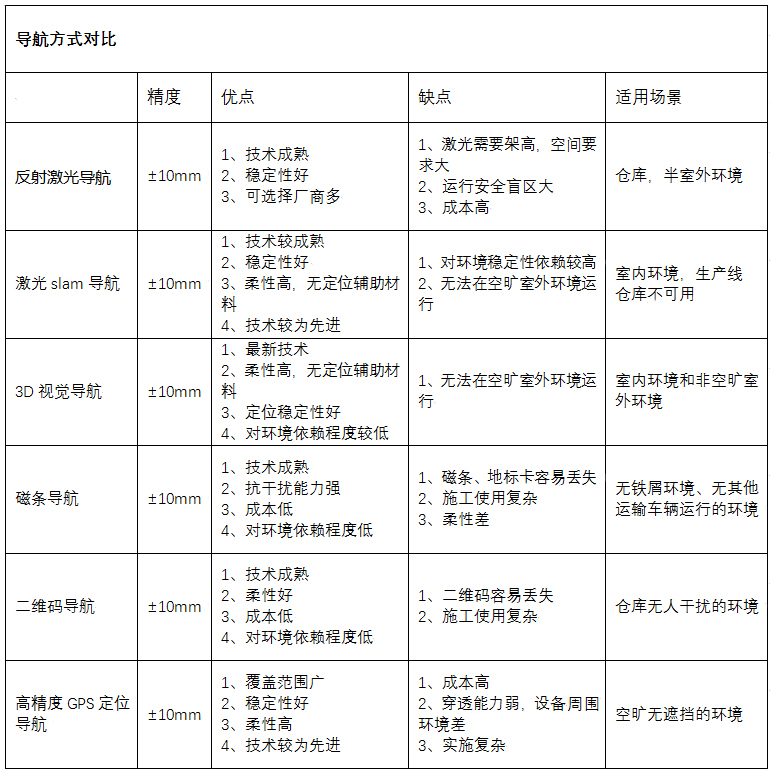
不同的应用环境需要选择的导航方式会存在很大的区别。选择错误的导航方式会导致智能搬运机器人在后期的使用过程中会出现很多异常问题,如定位丢失、定位不准确、上下料失败、故障停止等。更严重的会出现撞人或设备相互碰撞等安全事故的现象。按照环境特点来选择智能搬运机器人的导航方式是一个复杂的过程,需要对使用现场进行专业的评估,确定使用导航方案。
二、物料特征
搬运机器人的选择除了需要考虑使用环境之外,还需要考虑物料的特征(物料的单元存放模式)。常见的标准存放模式包括:静电箱、标准托盘、标准纸箱等。除了标准的存放模式外,每个企业都有自身生产需求定制的非标准的存放单元,主要为料车和料箱。下面是几种料车案例:

不同物料的存储形态需要的智能搬运机器人类型也不尽相同,一般情况下:

以上应用方式在大多数情况适用,有些存储单元比较特殊的需要综合考虑。不同的存储单元对于相同的物流搬运量,需要搬运的次数不同,最终使用机器人的数量也会有很大差异。比如:料箱的搬运量是100箱/h,如果采用料车的模式,一个料车可以放置5个料箱,搬运节拍可以从100次/h减少到20次/h。可以较大幅度的减少机器人的使用数量。当然这个还与产线的上下料方式相关,需要综合考虑。
三、物料节拍的要求
在生产过程中,物料运送节拍是直接关系生产能否正常运行的关键因素,因此,物料节拍是导入智能搬运机器人需要考虑的重要因素。
一般生产环境下,在考虑导入智能搬运机器人时,节拍的计算方式是按照峰值节拍上浮20%核算,这样不仅可以满足目前生产的需求,同时可以为将来产能提升预留空间。(注:峰值指的是生产旺季的很大运输数值)。当然这样考虑会出现投入成本过高的情况,如果投资预算有限,也可以按照平均值上浮20%计算。
考虑物料运送节拍时需要同时考虑物料的工装模型,不同的模型,同样的物料搬运量会有不同的搬运需求。

四、物流对接设备的要求
物流机器人在工厂内的应用主要是为了解决仓库到生产线物料的自动运输问题。因此,在智能搬运机器人接收到物料运送到产线后,智能搬运机器人如何与生产系统进行自动对接,是否能够自动上下料会对整体项目投资回报率有很大影响。自动上下料的方式会一定程度上减少使用的人工数量,提高投资回报率。
一般情况可以实现自动上下料对接的方式有如下几种:
辊筒线、皮带线、链条输送机、上下板机等自动输送设备,配套选择的智能搬运机器人的类型为辊筒式、智能抓取式或者叉车式。
专用设备上料(一般配备机械手),如果是大型料框的形式可以采用顶升式,如果是小型料箱的模式,可以采用辊筒式或者背负式。
机床、注塑机、测试工位等单个物料上下料的,可以采用协作式、固定机械臂配合背负式等。
其他情况,需要根据实际需求进行定制化设计。一般来说,机器人的导入会要求按上下料方式进行调整,设备需要与机器人进行交互。

5、物流通道的要求
物流通道是保证物料准时送达的重要途径,通道的宽度直接决定智能物流搬运机器人的效率。原则上是物流通道越宽越好,但是实际情况是为了提高单位面积的生产能力,物流通道的宽度会受到很大的限制。尤其在厂房租金较高区域,物流通道宽度通常较小。
一般而言,通道宽度设计有以下几个原则:
单向通道宽度:在搬运物料的外边缘两侧各预留100-150mm的宽度。(比如:叉车搬运的搬运托盘后,很大宽度的尺寸是1200mm,所以单向通道的宽度至少预留1500mm)。
直角转弯通道宽度,根据车体的长度和宽度确定,一般智能搬运机器人的参数会有相关要求,参考这个要求即可。
上下料机台对接空间,这个与对接形式和车型导航定位形式相关。
新厂房在设计阶段就已经在考虑导入智能搬运机器人,建议物流通道规划预留双向物流运输通道和人工行走通道,做到人车分流。这样可以有效的保证物流的效率和物流安全。
老厂房改造或者新厂房条件不允许的,无法设计人工通道或双向运行通道的,这需要根据实际情况规划物流路线。
根据项目经验看,不同导航方式对通道宽度的要求不同,不完全统计如下:
磁条导航-需要较大掉头空间,物流通道宽度大。
舵轮驱动-掉头空间需求大,物流通道宽度大。
激光类双轮差速驱动-可以原地掉头,对物流通道空间要求小。
视觉导航双轮差速-空间要求低,可以原地掉头。
以上这些要素是导入智能搬运机器人要考虑的因素,这些因素与选择的产品的使用类型不匹配会直接导致项目无法达到预期效果。当然导入智能搬运机器人还需要考虑很多其他要素,如防爆、无尘等级、系统对接、厂房高度、地面环境等,这些条件无法通过简单的描述进行归纳,需要专业的技术人员根据实际的情况提出更适合客户自己的解决方案。





